MT6701 Абсолютный бесконтактный датчик угла Магнитный энкодер 14бит
- Информация о материале
- Обновлено: 10.03.2023, 13:46
- Опубликовано: 10.03.2023, 13:28
- Автор: DeniS
 YYC-MT6701-CT MT6701-42 MT6701-23 магнитный энкодер, абсолютный датчик угла поворота, программируемый бесконтактный потенциометр
YYC-MT6701-CT MT6701-42 MT6701-23 магнитный энкодер, абсолютный датчик угла поворота, программируемый бесконтактный потенциометр
Подключение к Arduino
Библиотека от S-labs для подключения к Arduino MT6701-Arduino-Library
MT6701 datasheet скачать >>>
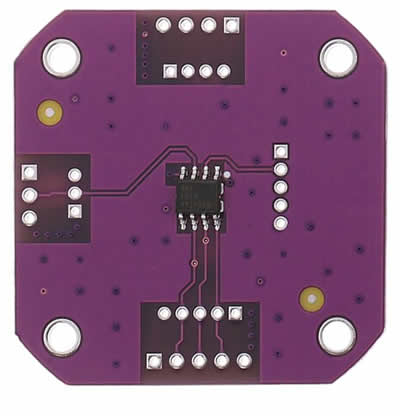
MT6701 Абсолютный бесконтактный датчик угла
Магнитный энкодер 42х42см

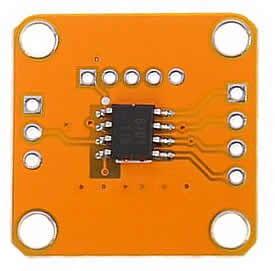
MT6701 Абсолютный бесконтактный датчик угла
Магнитный энкодер 4,2х4,2см
MT6701 Абсолютный бесконтактный датчик угла
Магнитный энкодер 2,2х2,2см
MT6701 Абсолютный бесконтактный датчик угла
Магнитный энкодер 2,2х2,2см
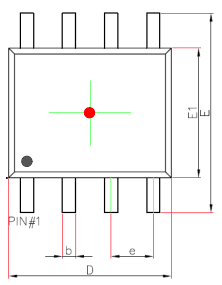
MT6701 нумерация ножек MT6701
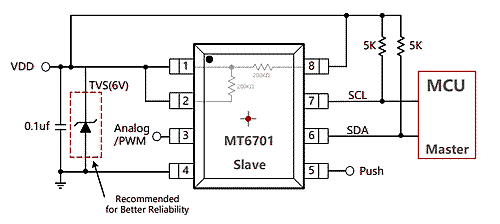
MT6701 подключение Arduino по I2C
Скетч MT6701 подключение Arduino
MT6701 установка получение 0 град позиции >>>
**********************************************************
/*
* 1. Open Serial Monitor at 9600 and there is no line ending
* 2. Send the character "s" to the Serial Monitor
*
* CORRECT SERIAL MONITOR LOGS
Sensor Found!
Reading Current Value...
Zero Degree Position (HEX): 0 [0 - default, but may be different]
Changing Value... Value Changed
Saving New Values...
Reading New Value...
Zero Degree Position After Saving (HEX): 8
Program Complete!
*
*/
#include <MT6701_I2C.h>
MT6701I2C SensorI2C(&Wire);
void setup() {
Serial.begin(9600);
SensorI2C.begin();
SensorI2C.setClock();
while(1) { // Waiting for the input of the character "s"
byte c;
if(Serial.available())
c = Serial.read();
if(c == 's') {
break;
}
delay(100);
}
while(!SensorI2C.isConnected()) {
Serial.println("Sensor not Connected!");
delay(500);
}
Serial.println("Sensor Found!");
Serial.println();
delay(300); // The delay is not important. so it's easier to see in the SM
Serial.println("Reading Current Value...");
word zdp;
zdp = SensorI2C.getZeroDegreePositionData();
Serial.print("Zero Degree Position (HEX): ");
Serial.println(zdp, HEX);
Serial.println();
delay(300); // The delay is not important. so it's easier to see in the SM
Serial.print("Changing Value... ");
word zdp_new = 0x0008; // New value
if(SensorI2C.setZeroDegreePositionDataVerify(zdp_new)) {
Serial.println("Value Changed");
} else {
Serial.println("Value Change Error");
}
Serial.println();
delay(300); // The delay is not important. so it's easier to see in the SM
Serial.println("Saving New Values...");
Serial.println();
// It's important to save the new values after the change.
// Called once even after setting multiple values
// else values return to default after power off
SensorI2C.saveNewValues();
delay(700); // >600ms
Serial.println("Reading New Value...");
word zdp_after;
zdp_after = SensorI2C.getZeroDegreePositionData();
Serial.print("Zero Degree Position After Saving (HEX): ");
Serial.println(zdp_after, HEX);
Serial.println();
Serial.println("Program Complete!");
}
void loop() {
// nop
}
**********************************************************