Драйвер шагового двигателя модуль ULN2003 подключение Arduino
- Информация о материале
-
Обновлено: 21.03.2023, 15:47
-
Опубликовано: 10.03.2023, 18:42
-
Автор: DeniS
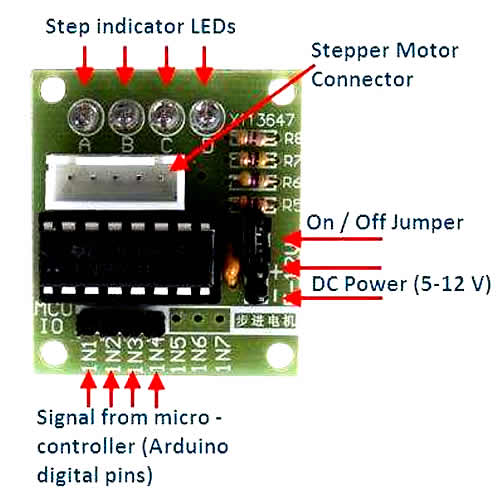
 Драйвер шагового двигателя модуль ULN2003
Драйвер шагового двигателя модуль ULN2003
Микросхема ULN2003A datasheet скачать >>>
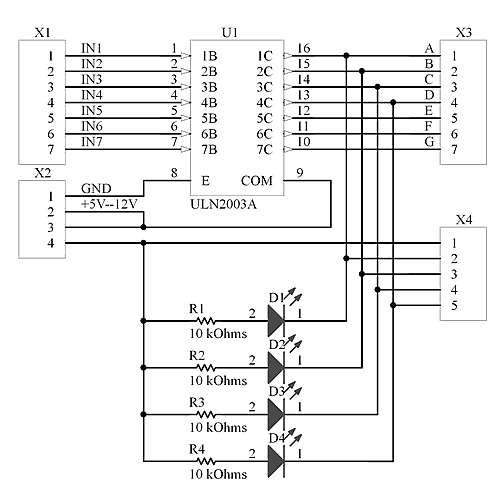
Назначение разъема X1
IN1 . . . IN7: Вход 1 … 7 Назначение X2
1 — GND: «-» питание модуля
2 — Vcc: «+» питание модуля (5В или 12В)
3 — Vcc: «+» питание модуля (перемычка, только при 5В)
4 — Vcc: «+» питание модуля (перемычка, только при 5В)
Назначение разъема X3
A . . . G: Выход 1 … 7
Назначение разъема X3
1 — Питание
2 — A
3 — B
4 — C
5 — D
Схема подключения шагового двигателя 28BYJ-48-5V с драйвером ULN2003 к Arduino
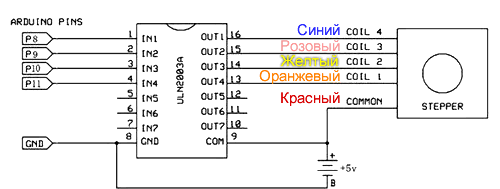
Подключение к Arduino драйвера шагового двигателя модуль ULN2003
Используется библиотека "CustomStepper". Данная библиотека не входит в стандартную среду разработки Arduino IDE
Нужно скачать и установить библиотеку CustomStepper.zip
Скетч для управления шаговым двигателем через модуль ULN2003
*********************************************************
#include <CustomStepper.h> // Подключаем библиотеку CustomStepper
CustomStepper stepper(8, 9, 10, 11); // Пины, к которым подключен драйвер шагового двигателя
boolean rotate1 = false; // Переменная для смены режимов
boolean rotatedeg = false; // Переменная для смены режимов
boolean crotate = false; // Переменная для смены режимов
void setup()
{
stepper.setRPM(12); // Устанавливаем количество оборотов в минуту
stepper.setSPR(4075.7728395); // Устанавливаем количество шагов на полный оборот. Максимальное значение 4075.7728395
}
void loop()
{
if (stepper.isDone() && rotate1 == false)
{
stepper.setDirection(CCW); // Устанавливает направление вращения (по часовой)
stepper.rotate(2); // Устанавливает вращение на заданное количество оборотов
rotate1 = true;
}
if (stepper.isDone() && rotate1 == true && rotatedeg == false)
{
stepper.setDirection(CW); // Устанавливает направление вращения (против часовой)
stepper.rotateDegrees(90); // Поворачивает вал на заданное кол-во градусов
rotatedeg = true;
}
if (stepper.isDone() && rotatedeg == true && crotate == false)
{
stepper.setDirection(CCW); // Устанавливает направление вращения (по часовой)
stepper.rotate(); // Будет вращать пока не получит команду о смене направления или STOP
crotate = true;
}
stepper.run(); // Этот метод обязателен в блоке loop. Он инициирует работу двигателя, когда это необходимо
}
*********************************************************
You have no rights to post comments